
|
Klausykite šio straipsnio |
Dirbtiniai raumenys maitina naują roboto koją, kurią sukūrė ETH Ciuricho ir Maxo Plancko intelektualių sistemų instituto (MPI-IS) mokslininkai. Įkvėpta gyvų būtybių, roboto koja judriai ir efektyviai energiją šokinėja įvairiomis vietovėmis.
Kaip ir žmonėms bei gyvūnams, tiesiamieji ir lenkiamasis raumuo užtikrina, kad roboto koja gali judėti abiem kryptimis. Šios elektrohidraulinės pavaros, kurias mokslininkai vadina HASEL, yra pritvirtintos prie skeleto sausgyslėmis.
Pavaros yra alyvos pripildyti plastikiniai maišeliai, panašūs į tuos, kurie naudojami ledo kubeliams gaminti. Maždaug pusė kiekvieno maišelio iš abiejų pusių padengta juodu elektrodu, pagamintu iš laidžios medžiagos. Thomas Buchner, ETH Ciuricho doktorantas, paaiškino, kad „kai tik mes įjungiame įtampą elektrodams, jie traukia vienas kitą dėl statinės elektros. Panašiai, kai trinu balioną į galvą, mano plaukai prilimpa prie baliono dėl tos pačios statinės elektros. Padidinus įtampą, elektrodai priartėja ir stumia alyvą maišelyje į vieną pusę, todėl maišelis apskritai trumpėja.
Šių pavarų poros, pritvirtintos prie skeleto, sukelia tuos pačius suporuotus raumenų judesius kaip ir gyvų būtybių: trumpėjant vienam raumeniui, pailgėja jo atitikmuo. Tyrėjai naudoja kompiuterinį kodą, kuris bendrauja su aukštos įtampos stiprintuvais, kad kontroliuotų, kurios pavaros susitraukia, o kurios išsiplečia.
Efektyvesnis nei elektros varikliai
Tyrėjai palygino savo roboto kojos energijos vartojimo efektyvumą su įprastos roboto kojos, varomos elektros varikliu. Be kita ko, jie analizavo, kiek energijos be reikalo paverčiama šiluma.
„Infraraudonųjų spindulių vaizde nesunku pastebėti, kad motorizuota koja sunaudoja daug daugiau energijos, jei, tarkime, ji turi būti sulenkta”, – sakė Buchneris. Priešingai, temperatūra elektrohidraulinėje kojoje išlieka ta pati. Taip yra todėl, kad dirbtinis raumuo yra elektrostatinis. „Tai panašu į pavyzdį su balionu ir plaukais, kai plaukai gana ilgai laikosi prilipę prie baliono“, – pridūrė Buchneris. „Paprastai elektriniu varikliu varomiems robotams reikalingas šilumos valdymas, o tam reikia papildomų aušintuvų arba ventiliatorių, kad šiluma būtų paskleista į orą. Mūsų sistema jų nereikalauja“, – sakė ETH Ciuricho doktorantas Toshihiko Fukushima.
 Registruokis dabar.
Registruokis dabar.
Roboto kojelė judriai juda nelygiu reljefu
Roboto kojos gebėjimas šokinėti pagrįstas jos gebėjimu sprogiai pakelti savo svorį. Tyrėjai taip pat parodė, kad roboto koja pasižymi dideliu prisitaikymo laipsniu, o tai ypač svarbu minkštajai robotikai. Tik jei raumenų ir kaulų sistema yra pakankamai elastinga, ji gali lanksčiai prisitaikyti prie atitinkamo reljefo.
„Tai nėra kitaip su gyvais padarais. Jei, pavyzdžiui, negalime sulenkti kelių, vaikščioti nelygiu paviršiumi tampa daug sunkiau“, – sakė Robertas Katzschmannas, ETH Ciuricho laboratorijoje įkūręs ir vadovaujantis „Soft Robotics Lab“. „Tik pagalvokite, kaip žengti žingsnį žemyn nuo šaligatvio į kelią“.
Priešingai nei elektros varikliai, kuriems reikalingi jutikliai, kurie nuolat nurodytų, kokiu kampu yra roboto koja, dirbtinis raumuo prisitaiko prie tinkamos padėties sąveikaudamas su aplinka. Tai lemia tik du įvesties signalai: vienas sulenkia jungtį ir kitas, kad jį pratęstų.
„Prisitaikymas prie reljefo yra pagrindinis aspektas. Kai žmogus nusileidžia iššokęs į orą, jam nereikia iš anksto galvoti, ar kelius sulenkti 90 laipsnių, ar 70 laipsnių kampu“, – Fukušima. Tas pats principas galioja ir roboto kojos raumenų ir kaulų sistemai: nusileidus kojos sąnarys adaptyviai pasislenka į tinkamą kampą, priklausomai nuo to, ar paviršius kietas, ar minkštas.
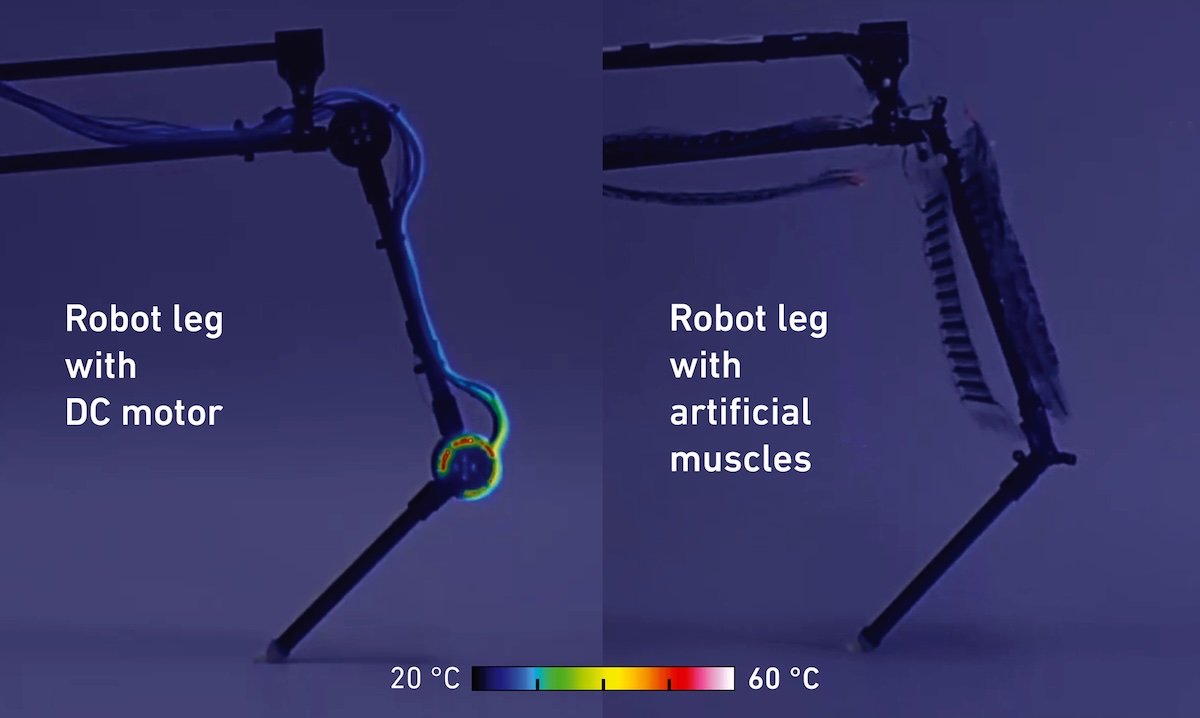
Kai roboto kojos ilgą laiką turi išlaikyti tam tikrą padėtį, per jas varantį nuolatinės srovės variklį (kairėje) teka daug srovės. Laikui bėgant energija prarandama šilumos pavidalu. Priešingai, dirbtiniai raumenys (dešinėje), kurie veikia elektrostatikos principu ir yra efektyvūs, lieka šalti, nes esant nuolatinei apkrovai jais neteka srovė. | Kreditas: ETH Ciurichas ir MPI-IS
Naujos technologijos atveria naujas galimybes
Elektrohidraulinių pavarų tyrimų sritis dar jauna, atsirado tik maždaug prieš šešerius metus. „Robotikos srityje sparčiai progresuoja pažangūs valdikliai ir mašininis mokymasis; priešingai, robotų aparatūros srityje padaryta daug mažesnė pažanga, o tai taip pat svarbu.
Katzschmannas pridūrė, kad mažai tikėtina, kad elektrohidraulinės pavaros bus naudojamos sunkiosiose mašinose statybvietėse, tačiau jos turi specifinių pranašumų, palyginti su standartiniais elektros varikliais. Tai ypač akivaizdu naudojant tokias programas kaip griebtuvai, kai judesiai turi būti labai pritaikyti atsižvelgiant į tai, ar suimamas objektas yra, pavyzdžiui, rutulys, kiaušinis ar pomidoras.
Katzschmannas turi vieną išlygą: „Palyginti su vaikščiojančiais robotais su elektros varikliais, mūsų sistema vis dar yra ribota. Šiuo metu koja pritvirtinta prie strypo, šokinėja ratais ir dar negali laisvai judėti.
Būsimas darbas turėtų įveikti šiuos apribojimus, atverdamas duris kurti tikrus vaikščiojančius robotus su dirbtiniais raumenimis. Jis toliau paaiškina: „Jei sujungsime roboto koją į keturkojį robotą arba humanoidinį robotą su dviem kojomis, galbūt vieną dieną, kai jis bus maitinamas baterijomis, galėsime jį panaudoti kaip gelbėjimo robotą“.
Redaktoriaus pastaba: Šis straipsnis buvo iš naujo paskelbtas iš ETH Ciuricho.