
|
Klausykite šio straipsnio |
Baltojoje knygoje paaiškinama, kaip sumažinti roboto virpėjimą naudojant programinę įrangą, kad būtų padidintas pramonės produktyvumas. Šaltinis: BlackBerry QNX
Robotai turi tiksliai sinchronizuoti gamybos programas, tokias kaip surinkimas, suvirinimas ir medžiagų tvarkymas. „BlackBerry QNX“ neseniai išleido informacinį dokumentą „Robotų tikslumo optimizavimas: našumo realiuoju laiku išlaisvinimas naudojant pažangius pagrindinius programinės įrangos sprendimus“.
Šiame dokumente pateikiamos gairės gamintojams, kaip sumažinti virpesius dideliu greičiu judant robotams. Priešingu atveju dėl to gali atsirasti netinkamai suderinti komponentai, sugadinti gaminiai ir sumažėti pralaidumas bei efektyvumas, teigė bendrovė.
Įkurta 1980 m., QNX tiekia komercines operacines sistemas, hipervizorius, kūrimo įrankius ir palaikymą bei paslaugas kritinėms įterptinėms sistemoms. 2010 m. „BlackBerry“ įsigijo Otavoje, Kanadoje, įsikūrusiame padalinyje aptarnaujamos tokios pramonės šakos kaip aviacijos ir gynybos, automobilių, sunkiosios technikos, pramoninės kontrolės, medicinos ir robotikos.
 Registruokis dabar.
Registruokis dabar.
BlackBerry QNX paaiškina baltojo popieriaus paskirtį
Louay Abdelkaderis, QNX vyresnysis produktų vadovas, atsakė į šiuos klausimus apie baltąją knygą iš Roboto ataskaita:
Kas yra šios baltosios knygos tikslinė auditorija?
Abdelkaderis: Mūsų QNX dokumentas skirtas patarti ir informuoti asmenis, atsakingus už programinės įrangos, kuri naudojama automatizuotoms transporto priemonėms (AGV), autonominiams mobiliesiems robotams (AMR), robotų judesio valdikliams, kūrimą. (Jie taip pat atsakingi už) moko pakabukus, skirtus roboto valdymui, duomenų rinkimui ir apdorojimui, žemėlapių sudarymui, vaizdų analizei, kelio planavimui, kliūčių išvengimui ir savarankiškumui.
Pavyzdžiui, tai aktualu programinės įrangos inžinieriams, kūrėjams ir lyderiams, produktų/programų vadovams ir kitoms techninėms ir netechninėms auditorijoms.
Kokie yra įprasti robotų nerimo ir delsos mažinimo būdai ir kaip jie nepasiekia?
Abdelkaderis: Didėjant visiškai ar net iš dalies autonominių sistemų poreikiams, programinės įrangos paketas tampa šių sistemų centru, todėl jos tampa turtingesnės ir sudėtingesnės. Kadangi šios sistemos yra labai svarbios saugai ir reikalauja labai patikimo bei deterministinio elgesio, vyrauja „kieti“ realaus laiko reikalavimai.
Bendrosios paskirties operacinių sistemų, tokių kaip „Linux“, apribojimai išryškėja dėl to, kad joje nėra saugos sertifikatų ir sudėtingas elgesys realiuoju laiku.
Yra keletas priežasčių, kodėl prasminga pereiti nuo bendrosios paskirties OS, kuriai būdingas „minkštas“ realaus laiko elgesys, prie kietosios realaus laiko OS (RTOS). Tai apima:
- Determinizmas ir laiko garantijos – „Hard RTOS“ suteikia griežtas laiko garantijas dėl reagavimo laiko ir vykdymo terminų.
- Sudėtingumo valdymas – Kadangi robotų programinė įranga tampa sudėtingesnė, labai svarbu užtikrinti, kad jūsų OS galėtų atlikti mišraus kritiškumo užduotis. Su Hard RTOS yra funkcijų ir galimybių, leidžiančių dizaineriams naudoti mišrią kritinę programinę įrangą tame pačiame krūvoje ir užtikrinti, kad būtų tinkamai atskirta, kad būtų išvengta kryžminio užteršimo gedimų arba su sauga / saugumu susijusių įvykių, kurie gali įvykti sistemos diegimas.
- Saugumas – Kietieji RTOS yra su saugos ir saugos funkcijomis, nes jos naudojamos saugos ir svarbiose sistemose. Kai kurie kietieji RTOS, kaip ir tie, kuriuos teikia QNX, turi ne tik saugos funkcijas ir galimybes, bet ir saugos sertifikatus, reikalingus konkrečioms aplinkoms, įskaitant pramoninę automatiką.
- Atsparumas gedimams ir patikimumas – Saugumui svarbiose programose, tokiose kaip bendradarbiaujančios robotų programos ir chirurginiai robotai, svarbiausia yra atsparumas gedimams ir patikimumas. Kietieji RTOS dažnai yra sukurti taip, kad būtų labai patvarūs, o vidutinis laikas tarp gedimų yra ilgas, taip pat mechanizmai, skirti gedimams valdyti ir užtikrinti tolesnį veikimą net aparatinės įrangos gedimų ar netikėtų įvykių atveju. Tai ypač efektyvu naudojant mikrobranduolių architektūrinį dizainą, kai branduolys ir OS paslaugos yra atskirtos. Taip užtikrinama, kad jei OS paslauga sugenda, ji neužterš branduolio ir nesukels jo poveikio ar strigimo, o tai gali sugadinti sistemą.
Kokie yra realaus laiko operacinių sistemų pavyzdžiai „minkštiems“, „tvirtai“ ir „kietiems“ požiūriams?
Abdelkaderis: Esant sudėtingam elgesiui realiuoju laiku, tikimasi griežtų laiko apribojimų su garantuotu atsako laiku. Termino praleidimas nėra išeitis, nes pasekmės yra katastrofiškos, ypač kai tai labai svarbi saugai.
Apsvarstykite, pavyzdžiui, AMR naršantį didelio srauto sandėlyje. Bet koks delsimas reaguoti į kliūtis ir pakeisti kryptį gali sukelti susidūrimus, galinčius sugadinti prekes ir sukelti pavojų personalo saugai.
Minkštas elgesys realiuoju laiku suteikia lankstumo matą, kai sistemos veikla pablogėja, jei ji negali atitikti konkrečių laiko reikalavimų. Nors šios sistemos siekia laikytis terminų, kartais jos gali toleruoti nedidelius nukrypimus be pražūtingų pasekmių.
Pramoninėje aplinkoje tikrinimo regėjimo sistemos vaidina svarbų vaidmenį. Šios sistemos užtikrina pagamintų gaminių kokybę ir tikslumą, kai nedidelis vėlavimas atlikti patikrinimą gali turėti įtakos gamybos efektyvumui, bet nesukels rimtų pasekmių.
Tvirtas elgesys realiuoju laiku yra panašus į minkštą realiojo laiko, bet šiek tiek skiriasi. Duomenys, gauti pasibaigus terminui, dažnai laikomi negaliojančiais. Puikus pavyzdys robotikoje yra automatizuotos 3D spausdinimo sistemos.
Gaminant priedus, jei sluoksnis nėra tiksliai nusodinamas laiku, gali atsirasti galutinio produkto defektų. Nors nedideli nukrypimai gali būti ne katastrofiški, jie gali lemti spausdintos detalės atmetimą, o tai gali pakenkti gamybos efektyvumui ir panaudoti medžiagas.
Girdėjome, kad dirbtinis intelektas gali išsisukti nuo deterministinio ir griežto požiūrio į robotines reakcijas. Ar tai dar tiesa?
Abdelkaderis: Robotinėse sistemose mažas delsimas ir virpėjimas yra esminis AI ir ne AI programų komponentas. Robotams skirtose programose, norint užtikrinti saugų ir deterministinį veikimą, realiojo laiko valdymui ir toliau reikės mažos delsos (minimalus apdorojimo delsimas) ir mažo virpėjimo (laiko nuoseklumas).
Determinizmas užtikrina, kad atsakymai į jutiklio įvestis arba aplinkos pokyčius įvyktų nuspėjamai ir per nurodytą laikotarpį. Kai dirbtinio intelekto modeliai yra naudojami ant krašto, įrenginiuose su ribotais skaičiavimo ištekliais, deterministinis apdorojimas taip pat gali padėti optimizuoti išteklių panaudojimą ir užtikrinti savalaikius atsakymus be nenuspėjamų vėlavimų.
RTOS žada pagerinti roboto patikimumą
Kaip QNX galėtų pagerinti patikimumą ir saugumą? Ar iš naujo paleidžiant komponentą reikės kelių sistemų?
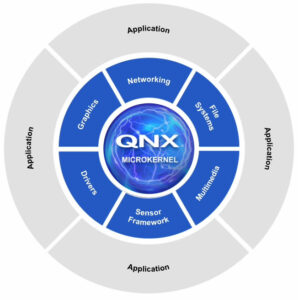
„BlackBerry“ sukūrė savo QNX mikrobrandulį optimizavimui.
Abdelkaderis: QNX RTOS yra sudėtinga realaus laiko OS, sukurta naudojant mikrobranduolių architektūrą, garsėjanti savo saugumu, saugumu ir patikimumu. Ši architektūra izoliuoja branduolį, kuris yra svarbiausias OS komponentas, savo atminties erdvėje ir valdo sistemos paslaugas savo atminties erdvėje už branduolio ribų, o tai suteikia papildomų izoliavimo ir saugos kliūčių OS viduje.
Sumažindama sudėtingumą ir galimus gedimo taškus, QNX palengvina nuodugnų patikrinimą atlikdama griežtus bandymus, įskaitant gedimų įpurškimo bandymus ir formalius metodus. Atskiruose komponentuose yra gedimų, todėl galima dinamiškai paleisti iš naujo be poveikio ar išjungimų visos sistemos mastu.
Saugumui svarbiose įterptosiose sistemose, kuriose galioja principas „Nėra saugumo be saugumo“, mažas mikrobranduolių plotas pagerina saugumo praktiką ir riboja privilegijuotą prieigą. Be to, jo modulinė konstrukcija leidžia pritaikyti konkrečius taikymo reikalavimus, todėl QNX yra idealus pasirinkimas robotų sistemoms, kurios teikia pirmenybę tvirtai saugai ir patikimumui.
Ar šiam RTOS reikia papildomos galios ar jutimo? Ar yra minimalūs reikalavimai? Kiek jis turi būti tvirtas?
Abdelkaderis: QNX RTOS yra mikroprocesoriuose su atminties valdymo blokais, veikiančiais Intel x86 arba ARMv8 arba ARMv9 procesoriuose. Lyginant QNX dydį su Linux, programinės įrangos kodo eilučių skaičius branduolyje yra žymiai mažesnis.
Dėl to paprastai reikia mažiau atminties ir apdorojimo galios, kad branduolys veiktų ir būtų efektyviai iškviestas, o našumo pagerinimas, kai realaus laiko taikomosios programos reikalauja nuspėjamumo ir nuoseklaus elgesio.
Turint mažesnę branduolio kodų bazę, tai taip pat reiškia, kad yra mažiau ir mažesnių galimų pažeidžiamumo taškų. Tai padeda padidinti sistemos tvirtumą ir patikimumą, nes branduolys yra svarbiausias OS komponentas.
Laiko patikrintas daugelyje programų visame pasaulyje, paprastai pamatysite, kad QNX yra įdiegtas nuo lėtesnio tempo aplinkose, pavyzdžiui, atominėse elektrinėse ar vandenyno plūduruose, iki greitesnio tempo aplinkose, pvz., pramoniniuose robotuose ir automobiliuose.
QNX gali integruotis su kitomis sistemomis
Ar QNX architektūra remiasi kokiu nors ryšiu su debesimi, transporto parko valdytojais ar kitais robotais? Ar galima su jais naudoti?
Abdelkaderis: Pati QNX architektūra pirmiausia skirta įterptoms sistemoms ir realaus laiko programoms, kur patikimumas, sauga ir saugumas yra prioritetas. Jis veikia nepriklausomai nuo debesies ryšio ar transporto parko valdymo sistemų.
Nors pati QNX nesuteikia integruotų debesų ryšio funkcijų, ją galima integruoti su debesijos paslaugomis, transporto parko valdymo sistemomis ar papildomais programinės įrangos sluoksniais. Kūrėjai gali įdiegti debesies ryšį su tarpine programine įranga, pvz., ROS, arba programomis, kurios palaiko ryšio protokolus, pvz., MQTT arba OPC UA.
Šis procesas leidžia QNX pagrįstiems įrenginiams sąveikauti su debesijos paslaugomis, skirtomis duomenų saugojimui, nuotoliniam stebėjimui, skaitmeniniams dvyniams ir kt.
QNX taip pat gali būti integruotas į transporto parko valdymo sistemas naudojant programinę įrangą, kuri atlieka tokias užduotis kaip įrenginių sekimas, telemetrijos duomenų rinkimas ir transporto parko optimizavimas. Ši integracija apima programinės įrangos komponentų, kurie bendrauja su QNX įrenginiais, kūrimą.
Kalbant apie ryšį tarp robotų, QNX naudojantys robotai gali naudoti standartinius ryšio protokolus, tokius kaip TCP/IP, kad bendradarbiautų, dalytųsi duomenimis ir efektyviai koordinuotų užduotis.
Ką robotikos kūrėjai ir tiekėjai turi žinoti apie tokių sistemų integravimą į savo gaminius? Kiek darbo reikia iš jų pusės?
Abdelkaderis: QNX teikia su POSIX suderinamą RTOS, kuri supaprastina kūrimą tiems, kurie yra susipažinę su POSIX suderinama OS, pvz., Linux. Šis apskaičiavimas reiškia, kad kūrėjai gali naudoti turimas žinias ir įrankius, supaprastindami integravimo procesą.
Be to, QNX siūlo ir saugos sertifikatus turinčius produktus, tokius kaip QNX OS ir QNX hipervizorius. RTOS užtikrina deterministinį saugos požiūriu svarbių programų elgesį, o hipervizorius leidžia sujungti aparatinę įrangą į vieną SoC per programinę įrangą, leidžiančią kūrėjams kurti saugos ir nesaugias programas toje pačioje platformoje.