
„Invent Automation“ integravo „CapSen“ regėjimo technologiją, kaip automatizuoja „DENSO“. Šaltinis: Invent Automation
Automobilių gamybai jau seniai buvo naudinga apgalvota robotikos ir automatikos diegimas, ir dėl geros priežasties. Tarp daugelio sudėtingų gamybos procesų kai kurie gali būti per sunkūs arba pernelyg varginantys, kad juos saugiai ir efektyviai atliktų žmonės. Dėl to pramoninės automatizavimo technologijos gali suteikti didžiulę vertę originalios įrangos gamintojams ir automobilių dalių tiekėjams įvairiais būdais. Pavyzdžiui, pirmaujantis pasaulinis automobilių dalių gamintojas DENSO neseniai siekė automatizuoti fiziškai sudėtingą ir pasikartojančią vežimo užduotį.
Užuot leidusi darbuotojams toliau krauti ir iškrauti dideles krūvas sunkių dėžių į dažymo kabiną ir iš jos (1 pav.), bendrovė bendradarbiavo su „CapSen Robotics“, kuri pritaikė savo 3D viziją, judesių planavimą ir valdymo programinę įrangą, kad ji atitiktų užduotį.
DENSO taip pat bendradarbiauja su sistemų integratoriumi „Invent Automation“, kad sukurtų sistemą, kuri supaprastintų procesą ir leistų darbuotojams prisidėti prie gamyklos aukšto vertingesniais, mažiau fiziškai reikalaujančiais būdais. Ši veikla prisidėjo prie platesnių DENSO pastangų papildyti žmonių darbą automatizavimu, siekiant pagerinti komandos narių ir įmonės veiklą.

1 pav. Dideli, sunkūs bagažinės, užpildytos automobilių dalimis, nešami į dažymo kabiną ir iš jos ant konvejerio, kur kobotas renka ir deda dėžes kaip automatinio proceso dalį. Šaltinis: Invent Automation
DENSO praėjo per (mažiau) 60 sekundžių
Vykdant DENSO veiklą, automobilių dalys yra nudažytos mažai blizgiais anglies spalvos dažais, kurie vizualiai išlygina paviršių, kad vaizdas būtų švaresnis, kartu sugertų šviesą ir sumažintų akinimą transporto priemonės viduje.
Ankstesnėje sąrankoje darbuotojai ant konvejerio sukrovė šešis krepšius, pilnus plastikinių automobilių dalių, kurie vėliau buvo pateikti operatoriui, kuris rankiniu būdu pašalindavo dalis ir padėtų jas į dažymo kabinos stotį (2 pav.), o tada supakuotų atgal į dėžes. . Darbuotojas kiekvieną dieną iš dienos kas 30 sekundžių sukraudavo arba išmesdavo dėžę.
Šis pasikartojantis judesys buvo įvardytas kaip automatizavimo galimybė, leidžianti komandos nariams atlikti efektyvesnį darbą. Tačiau parduotuvės grindų išdėstymo apribojimai apsunkino tradicines automatizavimo formas, todėl buvo sukurta kompaktiška ir lanksti sistema.
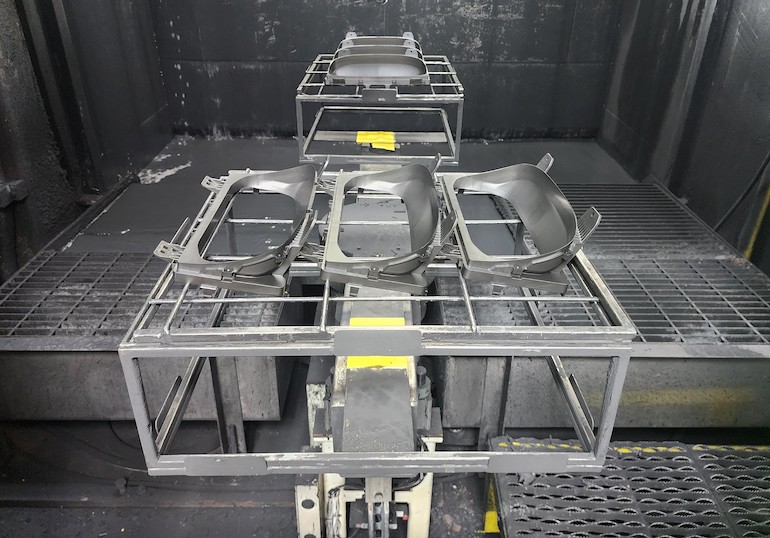
2 pav. Automobilių dalys pristatomos į dažymo kabiną, kur jos bus apipurškiamos mažai blizgiais dažais, kurie išlygina paviršių ir padeda sugerti šviesą transporto priemonės viduje. Šaltinis: Invent Automation
Naudojant naują sistemą, įeinantis konvejeris perneša nedažytų objektų dėžes į šešių ašių bendradarbiaujantį robotą (3 pav.) su Intel RealSense 3D RGB gylio kamera, pritvirtinta prie galinio efektoriaus. Kamera padeda robotui vizualiai atpažinti krepšį ir išmatuoti jo aukštį, kad būtų galima pasiimti.
„CapSen PiC 2.0“ programinė įranga, veikianti pramoniniame asmeniniame kompiuteryje su grafikos apdorojimo bloku (GPU), leidžia robotui planuoti savo judėjimą, nustatyti, pasirinkti ir valdyti dėžę bei perkelti jį link kito konvejerio, nukreipto į dažymo kabinos stotį. Ten dalys iškraunamos, nudažomos, dedamos į orkaitę kietėti ir apžiūrimos prieš dedant atgal į dėžes ir ant konvejerio, grįžtančio link roboto, kuris identifikuoja dėžę ir padeda jį ant išeinančio konvejerio.

3 pav. DENSO COBOTTA PRO 1300 bendradarbiaujantis robotas, tik nuoroda. Šaltinis: Invent Automation
Partneriai sprendžia manevringumo, regėjimo iššūkius
Kad robotas galėtų paimti ir sudėti didelius krepšius nesukeldamas jokių susidūrimų, reikalingi tikslūs judesiai išilgai kelių ašių. „CapSen PiC 2.0“ modeliavimo aplinka leido komandai išbandyti roboto manevringumą ir užtikrinti, kad viskas būtų pasiekiama ir kad robotas su niekuo nesusidurtų.
Tačiau kai komanda išbandė realaus pasaulio sistemą, ji išsiaiškino, kad batai pradėjo lenkti, kai juos paėmė robotas. Siekdami kompensuoti krepšio svorį ir užtikrinti sklandų judėjimą be susidūrimo kompaktinėje kameroje, partneriai stengėsi pritaikyti sistemą.
„Savo programinėje įrangoje naudojame dirbtinį intelektą, kad robotai galėtų atlikti įvairias paėmimo ir padėjimo užduotis, įskaitant atsitiktinį šiukšliadėžių rinkimą, mašinų priežiūrą, pakavimą, surinkimą ir vežimo tvarkymą“, – sakė „CapSen Robotics“ generalinis direktorius Jaredas Gloveris. „Sudėtingoms programoms, ypač toms, kur vien modeliavimo aplinkos nepakaks, savo AI algoritmus ir modelius pritaikome pagal gamybos užduoties duomenis. Tai leidžia programinei įrangai optimizuoti roboto judėjimą, kad jis galėtų laisvai judėti be susidūrimų ir perkelti krepšį per ciklo laiką.
DENSO lagaminų tvarkymo projektui „CapSen Robotics“ pirmiausia išmokė dirbtinio intelekto programinę įrangą, kad aptiktų ir lokalizuotų krepšelio rankenėlę. RGB-D kamera fiksuoja rankenos vaizdus, o programinė įranga paleidžia mašininio mokymosi algoritmus, kurie aptinka rankeną, todėl programinė įranga gali planuoti roboto judesius.
Kai roboto galinis efektas įdedamas į rankeną, turi būti nustatytas vežimėlio svoris, kad robotas nenustotų veikti arba nedarytų staigių trūkčiojimų, dėl kurių krepšys nukris. Užuot naudojusi svarstykles, „CapSen“ programinė įranga analizuoja variklio sukimo momento reikšmes ir naudoja šias vertes rinkimo svoriui nustatyti.
„Roboto sukimo momento jutiklio naudojimas norint gauti svorį ir, žinoma, patvirtinti, kad krepšys buvo paimtas, buvo vertingas poka jungas, kurį CapSen įtraukė į sistemą“, – sakė DENSO gamybos inžinierius Kevinas Peekas.
Be to, projektuojant ir diegiant sistemą iškilo kai kurių mašininio matymo problemų, tačiau bendradarbiaujanti komanda dirbo kartu, kad jie netaptų problema.
„Dėl dėžių taip pat gali būti iki šešių dėžių, taigi sistema reikalinga tinkamam sudėjimui užtikrinti“, – teigia Peekas. „Jei yra tik du rinkiniai, galbūt tai mažesnė problema, bet jei yra šeši rinkiniai, o vienas nėra tinkamai įdėtas, visa krūva gali apvirsti ir procesas labai vėluoti.
Kad išspręstų šį iššūkį, sistema suprojektuota taip, kad, kai robotas pastato kuprinę ant krūvos, robotas šiek tiek pasislenka atgal, kad pamatytų krūvą su kamera. Mašininio mokymosi algoritmai programinėje įrangoje padėjo sistemai ieškoti tarpo tarp dviejų banknotų ir užtikrinti tinkamą sudėjimą, o programinė įranga taip pat suskaičiavo ir patikrino teisingą paketų skaičių.

Registruokitės šiandien ir sutaupykite 40% konferencijos bilietų!
DENSO praneša apie nulį kritimų, nulį praleistų pasirinkimų
Galiausiai dėl „CapSen PiC 2.0“ programinės įrangos universalumo ji buvo pasirinkta kaip šio projekto programinės įrangos sprendimas, nes tai leidžia galutiniams vartotojams visapusiškai naudoti visus duomenis, gaunamus iš skirtingų sistemos aparatinės įrangos dalių. Tai yra užuot dirbus naudojant vietinį programavimą, pavyzdžiui, naudojant programuojamą loginį valdiklį (PLC). Šioje programoje nėra PLC korpuse.
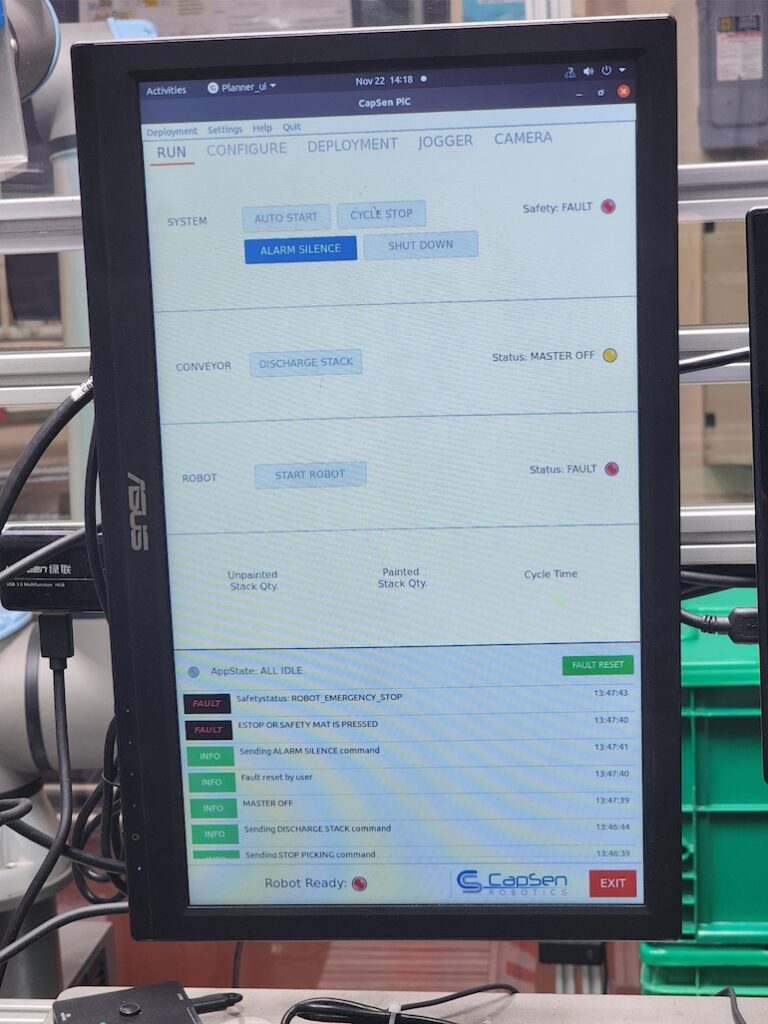
4 pav. Intuityvus „CapSen PiC“ HMI rodo sistemos būseną ir palengvina operacijos vykdymą. Šaltinis: Invent Automation
Viskas tvarkoma CapSen žmogaus ir mašinos sąsajoje (HMI). Operatoriai gali jį naudoti norėdami valdyti mašinas, gauti informaciją apie roboto kalibravimą ir vizualizuoti, ką mato kamera, be kitų funkcijų (4 pav.).
Vartotojo sąsaja buvo sukurta taip, kad netechniniai darbuotojai turėtų teisę valdyti sistemą kaip savo kasdienės veiklos dalį, nereikalaujant automatizavimo ar inžinerinių žinių.
Programinė įranga taip pat yra agnostinė, o tai suteikė specifinės naudos DENSO. Tiesą sakant, pradinis sistemos bandymas buvo susijęs su mobiliuoju manipuliavimu, kai autonominis mobilusis robotas (AMR) nešiojo robotą aplink objektą, siekdamas perkelti dėžes ir kitus konteinerius visame sandėlyje.
Šioje konfigūracijoje „CapSen“ programinė įranga valdo AMR, gauna iš jo koordinates ir siunčia taisymo instrukcijas AMR, kad AMR būtų suderinta su srauto stovo juostomis.
Nors dėžių krovimas ir išmontavimas yra įprastas pritaikymas pramoninėje aplinkoje, ši sistema buvo sukurta atsižvelgiant į lankstumą, kad ją būtų galima išplėsti arba pritaikyti kitoms programoms arba padaryti ją mobilią naudojant AMR.
Be to, nuo tada, kai buvo įdiegta sistema, robotas nenumetė nė vieno totalizatoriaus ir nepraleido nė vieno, nuimdamas nuo DENSO darbuotojų pečių tiek fizinį, tiek metaforinį svorį.
Apie autorę
Bo Ridley yra vykdomasis viceprezidentas Knoxville, Tenn. įsikūrusioje „Invent Automation“. Anksčiau jis dirbo gamybos inžinieriumi ir mašinų konstruktoriumi DENSO. Ši atvejo analizė paskelbta gavus leidimą.